Equilibrio Rotacional
Equilibrio Rotacional.- Ocurre cuando un cuerpo o sistema no gira con respecto a algún punto, aunque exista una tendencia.CONDICIONES DE EQUILIBRIO: Esta condición de equilibrio implica que una fuerza aislada aplicada sobre un cuerpo no puede producir por sí sola equilibrio y que, en un cuerpo en equilibrio, cada fuerza es igual y opuesta a la resultante de todas las demás. Así, dos fuerzas iguales y opuestas, actuando sobre la misma línea de acción, sí producen equilibrio. El equilibrio puede ser de tres clases: estable, inestable e indiferente. Si un cuerpo está suspendido, el equilibrio será estable si el centro de gravedad está por debajo del punto de suspensión; inestable si está por encima, e indiferente si coinciden ambos puntos. Si un cuerpo está apoyado, el equilibrio será estable cuando la vertical que pasa por el centro de gravedad caiga dentro de su base de sustentación; inestable cuando pase por el límite de dicha base, e indiferente cuando la base de sustentación sea tal que la vertical del centro de gravedad pase siempre por ella.
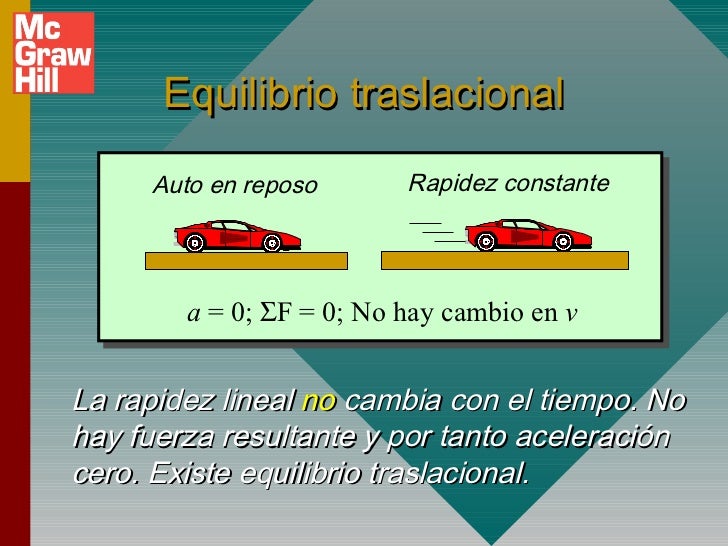
Estabilidad y EquilibrioUn cuerpo en equilibrio estático, si no se le perturba, no sufre aceleración de traslación o de rotación, porque la suma de todas las fuerzas u la suma de todos los momentos que actúan sobre él son cero. Sin embargo, si el cuerpo se desplaza ligeramente, son posibles tres resultados: (1) el objeto regresa a su posición original, en cuyo caso se dice que está en equilibrio estable; (2) el objeto se aparta más de su posición, en cuyo caso se dice que está en equilibrio inestable; o bien (3) el objeto permanece en su nueva posición, en cuyo caso se dice que está en equilibrio neutro o indiferente.Daremos los ejemplos siguientes: Una pelota colgada libremente de un hilo está en equilibrio estable porque si se desplaza hacia un lado, rápidamente regresará a su posición inicial. Por otro lado, un lápiz parado sobre su punta está en equilibrio inestable; si su centro de gravedad está directamente arriba de su punta la fuerza y el momento netos sobre él serán cero, pero si se desplaza aunque sea un poco, digamos por alguna corriente de aireo una vibración, habrá un momento sobre él y continuaré cayendo en dirección del desplazamiento original. Por último, un ejemplo de cuerpo en equilibrio indiferente es una esfera que descansa sobre una mesahorizontal; si se desplaza ligeramente hacia un lado permanecerá en su posición nueva.En la mayor parte de los casos como en el diseñode estructuras y en trabajos con el cuerpo humano, nos interesa mantener equilibrio estable o balance, como decimos a veces. En general un objeto cuyo centro de gravedad esté debajo de su punto de apoyo, como por ejemplo una pelota sujeta de un hilo, estará en equilibrio estable. Si el centro de gravedad está arriba de la base o soporte, tenemos un caso más complicado. Por ejemplo, el bloque que se para sobre su extremo, si se inclina ligeramente regresará a su estado original, pero si se inclina demasiado, caerá. El punto crítico se alcanza cuando el centro de gravedad ya no cae sobre la base de soporte. En general, un cuerpo cuyo centro de gravedad está arriba de su base de soporte estará en equilibrio estable si una línea vertical que pase por su centro de gravedad pasa dentro de su base de soporte. Esto se debe a que la fuerza hacia arriba sobre el objeto, la cual equilibra a la gravedad, sólo se puede ejercer dentro del área de contacto, y entonces, si la fuerza de gravedad actúa más allá de esa área, habrá un momento neto que volteará el objeto. Entonces la estabilidad puede ser relativa. Un ladrillo que yace sobre su cara más amplia es más estable que si yace sobre su extremo, porque se necesitará más esfuerzo para hacerlo voltear. En el caso extremo del lápiz, la base es prácticamente un punto y la menor perturbación lo hará caer. En general, mientras más grande sea la base y más abajo esté el centro de gravedad, será más estable el objeto.En este sentido, los seres humanos son mucho menos estables que losmamíferoscuadrúpedos, los cuales no sólo tienen mayor base de soporte por sus cuatro patas, sino que tienen un centro de gravedad más bajo. La especie humana tuvo que desarrollar características especiales, como ciertos músculosmuy poderosos, para podermanejar el problema de mantenerse parados y al mismo tiempo estable. A causa de su posición vertical, los seres humanos sufren de numerosos achaques, como el dolor de la parte baja de la espalda debido a las grandes fuerzas que intervienen. Cuando camina y efectúa otros tipos de movimientos, una persona desplaza continuamente su cuerpo, de modo que su centro de gravedad esté sobre los pies, aunque en el adulto normal ello no requiera de concentración de pensamiento. Un movimiento tan sencillo, como el inclinarse, necesita del movimiento de la cadera hacia atrás para que el centro de gravedad permanezca sobre los pies, y este cambio de posición se lleva a cabo sin reparar en él. Para verlo párese usted con sus piernas y espalda apoyadas en una pared y trate de tocar los dedos de sus pies. Las personas que cargan pesos grandes ajustan en forma automática su postura para que el centro de gravedad de la masa total caiga sobre sus pies.Principios de Equilibrio1. Condiciones Generales de Equilibrioa. La suma algebraica de las componentes (rectangulares) de todas las fuerzas según cualquier línea es igual a cero.